

")












At first Stephen Mascaro was too shy to buy his own adhesives for press-on fingernails. He had his wife pick them up for him. Then, on the day before Halloween, he felt bold enough to buy a pack himself. He went to his neighborhood drugstore, where he faced a bewildering array of fingernail cosmetics. He tried to act nonchalant when women passed by, while wondering to himself what they must think he's up to. Finally he found the right adhesives - one small personal breakthrough in his quest to help people suffering from arthritis or repetitive-motion injuries. Mascaro, a mechanical engineer involved in robotics research at North Dakota State University, is working to invent fingernail sensors that could operate a computer without the strain caused by a mouse or keyboard.
Overcoming minor embarrassment is only one of the unusual challenges Mascaro has confronted in pursuit of the light-reading sensors, which would be worn like press-on cosmetic nails. First, there was a bit of gore to contend with. When starting his research, he had to immerse himself in the anatomy of the human hand. That meant poring through medical books, a gruesome task for an engineer grown accustomed to bloodless mathematical formulas and computer models. Still, he counts himself lucky.
"It turns out there were all of these people who had studied the anatomy of fingertips," says the assistant professor, who favored Legos and toy robots over playing with frogs while growing up in Nyack, N.Y. "There was plenty of gore for me from the pictures." From the anatomy and physiology books, though, Mascaro gained the foundation to start work on a mechanical sensor model for measuring patterns created by blood flowing through fingertip capillaries. His aim, no simple feat, was to develop a device able to track pressure in order to sense movement in all three dimensions.
To do that, Mascaro had to collect loads of data charting finger movements and their corresponding blood-flow patterns - red when the tiny vessels fill with blood, white when the blood drains - that then could be translated into inputs traditionally provided by a keyboard or mouse. That meant asking friends - fellow engineering graduate students at MIT, where he earned his master's and doctorate - to volunteer as finger models. The job wasn't at all glamorous; it required mindless repetitions of bending and pushing their fingers, each movement creating its signature pattern. Tiny diodes in the sensors shine light down into the fingertip, and variations in the reflection of the light rays reveal the blood-flow pattern.
Mascaro toiled for countless hours before coming to an unhappy conclusion: He'd have to abandon his anatomically driven approach to estimate 3-D forces, and switch to a data-driven method. "It's not that what I did was wasted," he says. "It's that that model would only take me so far." And the work did yield helpful insights. For one thing, it turns out that people with all sorts of finger sizes make uniform capillary patterns. That observation enabled him to pinpoint where to put his sensors. Along the way he solved other problems. He had to paint his fingertip attachments with an opaque black coating to block out extraneous light that was confusing his sensors - and in doing so added a Goth fashion flair to his creation. Now he's working on a calibration method based on data and mathematical formulas - algorithms to the rescue - and figures he's at least a couple of years from having it perfected.
Still, the fingernail sensors already have attracted attention from the robotics industry. Last fall, Mascaro and his MIT mentor, Harry Asada, demonstrated the device at a robotics show in Las Vegas. Robotics, in fact, provided the original inspiration for the fingernail sensors, first seen as a novel way to control robots. "People have been following my work for a few years now," says Mascaro, who came to NDSU last fall. "Everybody acknowledges that it's a very novel device but they're waiting to see if I can translate it into a computer mouse that's reliable."
So far, he can get his sensors to easily control one dimension. Once he can get them to control two dimensions, plus devise a clicking mechanism, he'll have the rudiments of a mouse. For now, his sensors are attached to a computer by wires, but Mascaro envisions wireless connections will become standard. That's not all he imagines. Besides helping the disabled, the technology for his fingernail sensors could be used for cell phones and other devices with small control panels. "You could turn virtually any surface into a virtual keyboard," he says.
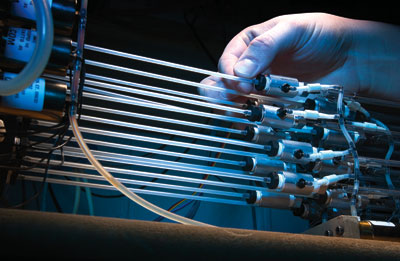
Some day. But lately another project has been demanding most of Mascaro's time in the lab. He's trying to make artificial muscles to operate robots and other machines. With help from a graduate student, Mascaro is experimenting with an alloy that remembers its shape. Unlike most metals, nickel titanium contracts when heated. To make the alloy act like a muscle, Mascaro is taking his cues from Mother Nature. He's trying to mimic the body's circulatory system by devising a system of wires within tubes that carry water. Varying the water temperature can make the wires expand and contract - much like a muscle that flexes and relaxes. In a laboratory, Mascaro and Les Flemming, a graduate mechanical engineering student, are experimenting with an apparatus of 16 tube-encased wires hooked up to valves and switches - basically a crude mechanical bicep on a workbench.
When electricity passes through the wire it contracts from heat, "remembering" its previous shape; then, when cool water is pumped through the tube, the wire expands. Just like a muscle at work or rest. But difficult challenges confront Mascaro and Flemming. One is to improve the energy-efficiency of the process. Another is that nickel titanium, though quite flexible for a metal, only expands or contracts by 4 percent of its original length, a capability called "stroke." Also, after thousands of repeated manipulations, the wires can break. Because of that, Mascaro believes shape-memory alloys will be stopgap materials that eventually will be replaced by special polymers. Researchers are developing polymers with 10-percent "stroke," but lots of work remains.
One of the trickiest challenges is to devise a nervous system that would operate the array of muscle strands - control software to handle the staggering combinations of coordinated valve and switch inputs that will be required to make the wires work smoothly together like muscles. That's an area that Flemming, who has a background in computer control systems, is working on.
"It's a lot of little questions you need to ask," Flemming says of his programming task. Three pounds of force or half a pound? Six inches of "stroke" or two inches? The software must be programmed to consider all the possible inputs, and outputs. They're daunting challenges, but the concept holds real promise. Fluid helps the wires cool much faster, allowing them to change shape in a little more than a tenth of a second - significantly faster than earlier systems. Someday, it seems clear, gadgets will move with artificial muscles.
"I haven't focused too much on applications," Mascaro says. "This is sort of exploratory work. I'm just interested in trying something new and doing something nobody's done before. Nobody's really tried to create robots with a vascular system before."
Robots, meanwhile, are becoming more advanced, even for the consumer market. Earlier this year, Honda demonstrated a humanoid robot that can walk up a flight of stairs, move its arms and balance on one foot. Sony now makes toy robots, including small pet dogs, that require relatively bulky motor "actuators" to make their limbs move. The machines would be even more lifelike with artificial muscles. "Imagine what we could do if we had these kind of actuators," Mascaro says, gesturing to the twitching prototype on his lab bench. Well, maybe it won't soon be the forerunner of a Doberman. "A smaller dog," he allows, "probably not faster."
Forget fido. Ultimately, the big customer will be the Pentagon. The Defense Department already is asking scientists to build prototype robots that can crawl, jump, even fly, with the goal of replacing human soldiers in hazardous situations. Who knows? Maybe artificial muscles will help hunt down some future Osama Bin Laden. "People are working on robots that will go into caves, search out terrorists," Mascaro says.
But early applications of the artificial muscles are apt to be both more peaceful and more ordinary. One possibility: replacing the embedded motors in adjustable car seats. Cars are especially well suited, because their engines generate lots of waste heat that could be used to heat water to make the wires contract. Then, as the technologies improve, moveable car seats will evolve into beefy, more lifelike robots. How far down the road are robots powered by artificial muscles - five years? Ten? Fifteen? Mascaro, the cautious engineer, shies away from making any bold predictions. "I don't want to stake my reputation on anything," he says of prognostications. "I just want to see how it goes." Meanwhile, when time permits, he'll return to his fingernail sensor project. He's already dreading his next trip to the drugstore.

")














